Nothing
Solving Differential-Algebraic Equations (DAE) in R with diffeqr
In diffeqr: Solving Differential Equations (ODEs, SDEs, DDEs, DAEs)
knitr::opts_chunk$set(
collapse = TRUE,
comment = "#>"
)
A differential-algebraic equation is defined by an implicit function f(du,u,p,t)=0. All of the controls are the
same as the other examples, except here you define a function which returns the residuals for each part of the equation
to define the DAE. The initial value u0 and the initial derivative du0 are required, though they do not necessarily
have to satisfy f (known as inconsistent initial conditions). The methods will automatically find consistent initial
conditions. In order for this to occur, differential_vars must be set. This vector states which of the variables are
differential (have a derivative term), with false meaning that the variable is purely algebraic.
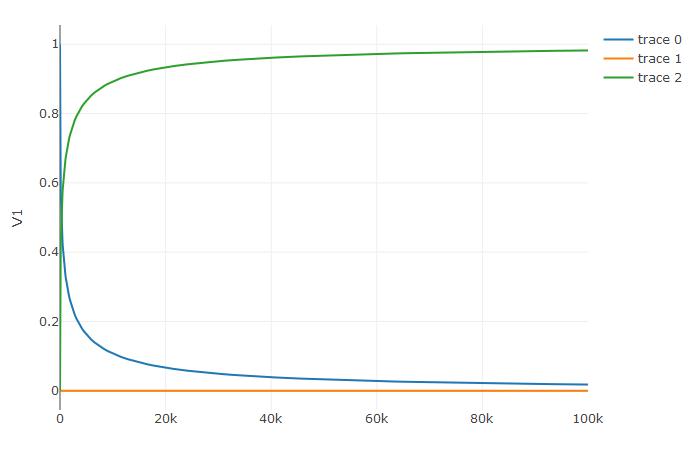
This example shows how to solve the Robertson equation:
f <- function (du,u,p,t) {
resid1 = - 0.04*u[1] + 1e4*u[2]*u[3] - du[1]
resid2 = + 0.04*u[1] - 3e7*u[2]^2 - 1e4*u[2]*u[3] - du[2]
resid3 = u[1] + u[2] + u[3] - 1.0
c(resid1,resid2,resid3)
}
u0 <- c(1.0, 0, 0)
du0 <- c(-0.04, 0.04, 0.0)
tspan <- c(0.0,100000.0)
differential_vars <- c(TRUE,TRUE,FALSE)
prob <- de$DAEProblem(f,du0,u0,tspan,differential_vars=differential_vars)
sol <- de$solve(prob)
udf <- as.data.frame(t(sapply(sol$u,identity)))
plotly::plot_ly(udf, x = sol$t, y = ~V1, type = 'scatter', mode = 'lines') %>%
plotly::add_trace(y = ~V2) %>%
plotly::add_trace(y = ~V3)
Additionally, an in-place JIT compiled form for f can be used to enhance the speed:
f = JuliaCall::julia_eval("function f(out,du,u,p,t)
out[1] = - 0.04u[1] + 1e4*u[2]*u[3] - du[1]
out[2] = + 0.04u[1] - 3e7*u[2]^2 - 1e4*u[2]*u[3] - du[2]
out[3] = u[1] + u[2] + u[3] - 1.0
end")
u0 <- c(1.0, 0, 0)
du0 <- c(-0.04, 0.04, 0.0)
tspan <- c(0.0,100000.0)
differential_vars <- c(TRUE,TRUE,FALSE)
JuliaCall::julia_assign("du0", du0)
JuliaCall::julia_assign("u0", u0)
JuliaCall::julia_assign("p", p)
JuliaCall::julia_assign("tspan", tspan)
JuliaCall::julia_assign("differential_vars", differential_vars)
prob = JuliaCall::julia_eval("DAEProblem(f, du0, u0, tspan, p, differential_vars=differential_vars)")
sol = de$solve(prob)
Try the diffeqr package in your browser
Any scripts or data that you put into this service are public.
diffeqr documentation built on Oct. 20, 2023, 5:07 p.m.
R Package Documentation
Browse R Packages
We want your feedback!
Note that we can't provide technical support on individual packages. You should contact the package authors for that.
knitr::opts_chunk$set( collapse = TRUE, comment = "#>" )
A differential-algebraic equation is defined by an implicit function f(du,u,p,t)=0. All of the controls are the
same as the other examples, except here you define a function which returns the residuals for each part of the equation
to define the DAE. The initial value u0 and the initial derivative du0 are required, though they do not necessarily
have to satisfy f (known as inconsistent initial conditions). The methods will automatically find consistent initial
conditions. In order for this to occur, differential_vars must be set. This vector states which of the variables are
differential (have a derivative term), with false meaning that the variable is purely algebraic.
This example shows how to solve the Robertson equation:
f <- function (du,u,p,t) { resid1 = - 0.04*u[1] + 1e4*u[2]*u[3] - du[1] resid2 = + 0.04*u[1] - 3e7*u[2]^2 - 1e4*u[2]*u[3] - du[2] resid3 = u[1] + u[2] + u[3] - 1.0 c(resid1,resid2,resid3) } u0 <- c(1.0, 0, 0) du0 <- c(-0.04, 0.04, 0.0) tspan <- c(0.0,100000.0) differential_vars <- c(TRUE,TRUE,FALSE) prob <- de$DAEProblem(f,du0,u0,tspan,differential_vars=differential_vars) sol <- de$solve(prob) udf <- as.data.frame(t(sapply(sol$u,identity))) plotly::plot_ly(udf, x = sol$t, y = ~V1, type = 'scatter', mode = 'lines') %>% plotly::add_trace(y = ~V2) %>% plotly::add_trace(y = ~V3)
Additionally, an in-place JIT compiled form for f can be used to enhance the speed:
f = JuliaCall::julia_eval("function f(out,du,u,p,t) out[1] = - 0.04u[1] + 1e4*u[2]*u[3] - du[1] out[2] = + 0.04u[1] - 3e7*u[2]^2 - 1e4*u[2]*u[3] - du[2] out[3] = u[1] + u[2] + u[3] - 1.0 end") u0 <- c(1.0, 0, 0) du0 <- c(-0.04, 0.04, 0.0) tspan <- c(0.0,100000.0) differential_vars <- c(TRUE,TRUE,FALSE) JuliaCall::julia_assign("du0", du0) JuliaCall::julia_assign("u0", u0) JuliaCall::julia_assign("p", p) JuliaCall::julia_assign("tspan", tspan) JuliaCall::julia_assign("differential_vars", differential_vars) prob = JuliaCall::julia_eval("DAEProblem(f, du0, u0, tspan, p, differential_vars=differential_vars)") sol = de$solve(prob)
Try the diffeqr package in your browser
Any scripts or data that you put into this service are public.
R Package Documentation
Browse R Packages
We want your feedback!
Note that we can't provide technical support on individual packages. You should contact the package authors for that.
Embedding an R snippet on your website
Add the following code to your website.
For more information on customizing the embed code, read Embedding Snippets.