inst/examples/pomp_explore.md
In cboettig/populationdynamics: Tools to simulate various population dynamics models in ecology
require(pomp)
gompertz.proc.sim <- function(x, t, params, delta.t, ...) {
r <- params["r"]
K <- params["K"]
sigma <- params["sigma"]
X <- x["X"] # the state at time t:
## generate a log-normal random variable:
eps <- exp(rnorm(n = 1, mean = 0, sd = sigma))
## compute the state at time t+delta.t:
S <- exp(-r * delta.t)
c(X = unname(K^(1 - S) * X^S * eps))
}
gompertz.meas.sim <- function(x, t, params, ...) {
tau <- params["tau"]
X <- x["X"] # state at time t:
y <- c(Y = unname(rlnorm(n = 1, meanlog = log(X), sd = tau)))
}
create a container of class pomp to hold the model and data.
gompertz <- pomp(data = data.frame(time = 1:100, Y = NA), times = "time",
rprocess = discrete.time.sim(step.fun = gompertz.proc.sim, delta.t = 1),
rmeasure = gompertz.meas.sim, t0 = 0)
Parameters and inital condition:
theta <- c(r = 0.1, K = 1, sigma = 0.1, tau = 0.1, X.0 = 1)
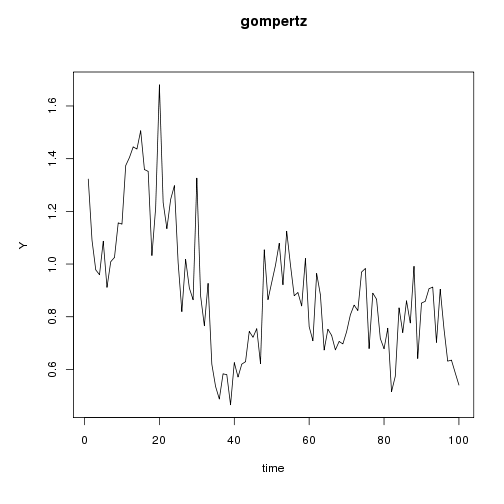
gompertz <- simulate(gompertz, params = theta)
plot(gompertz, variables = "Y")
Likelihood using a particle filter (sequential Monte Carlo) requires the measurement density (but not the process density).
gompertz.meas.dens <- function(y, x, t, params, log, ...) {
tau <- params["tau"]
## state at time t:
X <- x["X"]
## observation at time t:
Y <- y["Y"]
## compute the likelihood of Y|X,tau
dlnorm(x = Y, meanlog = log(X), sdlog = tau, log = log)
}
Stick the new function into our container:
gompertz <- pomp(gompertz, dmeasure = gompertz.meas.dens)
Then we get a point estimate of the likelihood,
pf <- pfilter(gompertz, params = theta, Np = 1000)
logLik(pf)
[1] 49.29
Iterated filtering
We will do this in the transformed variable space, so we add
our transformation method to the container:
gompertz <- pomp(gompertz, parameter.transform = function(params,
...) {
exp(params)
}, parameter.inv.transform = function(params, ...) {
log(params)
})
Now we're ready for an iterated-filtering run. This is gonna be slow,
so let's set up a parallel architecture first:
require(snowfall)
sfInit(parallel = TRUE, cpu = 10)
R Version: R version 2.15.0 (2012-03-30)
sfLibrary(pomp)
Library pomp loaded.
rep <- function(dummy_index) {
estpars <- c("r", "sigma", "tau")
theta.guess <- coef(gompertz)
theta.guess[estpars] <- rlnorm(n = length(estpars), meanlog = log(theta.guess[estpars]),
sdlog = 1)
mif(gompertz, Nmif = 100, start = theta.guess, transform = TRUE, pars = estpars,
rw.sd = c(r = 0.02, sigma = 0.02, tau = 0.05), Np = 2000, var.factor = 4,
ic.lag = 10, cooling.factor = 0.999, max.fail = 10)
}
sfExportAll()
system.time(mf <- sfSapply(1:10, rep))
user system elapsed
0.02 0.00 1037.39
save(list = ls(), file = "pomp_explore.rda")
The key idea of iterated filtering is to replace the model we are interested in fitting—which has time invariant parameters—with a model that is just the same except that its parameters take a random walk in time. As the intensity of this random walk approaches zero, the modified model approaches the original model.
(which it does by cooling? So convergence is already going to happen by cooling?)
Adding additional variability in this way has three positive effects:
- smooths the likelihood surface, which makes optimization easier
- it combats particle depletion, the fundamental difficulty associated with the particle filter, and
- the additional variability can be exploited to estimate of the gradient of the (smoothed) likelihood surface with no more computation than is required to estimate of the value of the likelihood.
(So uncertainty estimates comes from the gradient estimate?)
Evaluate convergence
just the mean of coefs across the 10 reps -- gosh wish Aaron would learn data structures
theta.mif <- apply(sapply(mf, coef), 1, mean)
theta.mif
r K sigma tau X.0
0.04385 1.00000 0.09647 0.10495 1.00000
Evaluating the log-likelihoods at the convergent parameters requires the particle filter. This line applies the particle filter to each of the parameter estimates
loglik.mif <- replicate(n = 10, logLik(pfilter(mf[[1]], params = theta.mif,
Np = 10000)))
bl <- mean(loglik.mif)
loglik.mif.est <- bl + log(mean(exp(loglik.mif - bl)))
loglik.mif.se <- sd(exp(loglik.mif - bl))/exp(loglik.mif.est - bl)
c(est = loglik.mif.est, se = loglik.mif.se)
est se
51.45397 0.09316
"True" uses the original model and coefficients rather than the estimated one, but still approximates the log.likelihood using particle filtering
loglik.true <- replicate(n = 10, logLik(pfilter(gompertz, params = coef(gompertz),
Np = 10000)))
loglik.true.est <- bl + log(mean(exp(loglik.true - bl)))
loglik.true.se <- sd(exp(loglik.true - bl))/exp(loglik.true.est -
bl)
c(est = loglik.true.est, se = loglik.true.se)
est se
50.0128 0.1062
cboettig/populationdynamics documentation built on May 13, 2019, 2:11 p.m.
R Package Documentation
Browse R Packages
We want your feedback!
Note that we can't provide technical support on individual packages. You should contact the package authors for that.
require(pomp)
gompertz.proc.sim <- function(x, t, params, delta.t, ...) {
r <- params["r"]
K <- params["K"]
sigma <- params["sigma"]
X <- x["X"] # the state at time t:
## generate a log-normal random variable:
eps <- exp(rnorm(n = 1, mean = 0, sd = sigma))
## compute the state at time t+delta.t:
S <- exp(-r * delta.t)
c(X = unname(K^(1 - S) * X^S * eps))
}
gompertz.meas.sim <- function(x, t, params, ...) {
tau <- params["tau"]
X <- x["X"] # state at time t:
y <- c(Y = unname(rlnorm(n = 1, meanlog = log(X), sd = tau)))
}
create a container of class pomp to hold the model and data.
gompertz <- pomp(data = data.frame(time = 1:100, Y = NA), times = "time",
rprocess = discrete.time.sim(step.fun = gompertz.proc.sim, delta.t = 1),
rmeasure = gompertz.meas.sim, t0 = 0)
Parameters and inital condition:
theta <- c(r = 0.1, K = 1, sigma = 0.1, tau = 0.1, X.0 = 1)
gompertz <- simulate(gompertz, params = theta)
plot(gompertz, variables = "Y")
Likelihood using a particle filter (sequential Monte Carlo) requires the measurement density (but not the process density).
gompertz.meas.dens <- function(y, x, t, params, log, ...) {
tau <- params["tau"]
## state at time t:
X <- x["X"]
## observation at time t:
Y <- y["Y"]
## compute the likelihood of Y|X,tau
dlnorm(x = Y, meanlog = log(X), sdlog = tau, log = log)
}
Stick the new function into our container:
gompertz <- pomp(gompertz, dmeasure = gompertz.meas.dens)
Then we get a point estimate of the likelihood,
pf <- pfilter(gompertz, params = theta, Np = 1000)
logLik(pf)
[1] 49.29
Iterated filtering
We will do this in the transformed variable space, so we add our transformation method to the container:
gompertz <- pomp(gompertz, parameter.transform = function(params,
...) {
exp(params)
}, parameter.inv.transform = function(params, ...) {
log(params)
})
Now we're ready for an iterated-filtering run. This is gonna be slow, so let's set up a parallel architecture first:
require(snowfall)
sfInit(parallel = TRUE, cpu = 10)
R Version: R version 2.15.0 (2012-03-30)
sfLibrary(pomp)
Library pomp loaded.
rep <- function(dummy_index) {
estpars <- c("r", "sigma", "tau")
theta.guess <- coef(gompertz)
theta.guess[estpars] <- rlnorm(n = length(estpars), meanlog = log(theta.guess[estpars]),
sdlog = 1)
mif(gompertz, Nmif = 100, start = theta.guess, transform = TRUE, pars = estpars,
rw.sd = c(r = 0.02, sigma = 0.02, tau = 0.05), Np = 2000, var.factor = 4,
ic.lag = 10, cooling.factor = 0.999, max.fail = 10)
}
sfExportAll()
system.time(mf <- sfSapply(1:10, rep))
user system elapsed
0.02 0.00 1037.39
save(list = ls(), file = "pomp_explore.rda")
The key idea of iterated filtering is to replace the model we are interested in fitting—which has time invariant parameters—with a model that is just the same except that its parameters take a random walk in time. As the intensity of this random walk approaches zero, the modified model approaches the original model.
(which it does by cooling? So convergence is already going to happen by cooling?)
Adding additional variability in this way has three positive effects:
- smooths the likelihood surface, which makes optimization easier
- it combats particle depletion, the fundamental difficulty associated with the particle filter, and
- the additional variability can be exploited to estimate of the gradient of the (smoothed) likelihood surface with no more computation than is required to estimate of the value of the likelihood.
(So uncertainty estimates comes from the gradient estimate?)
Evaluate convergence
just the mean of coefs across the 10 reps -- gosh wish Aaron would learn data structures
theta.mif <- apply(sapply(mf, coef), 1, mean)
theta.mif
r K sigma tau X.0
0.04385 1.00000 0.09647 0.10495 1.00000
Evaluating the log-likelihoods at the convergent parameters requires the particle filter. This line applies the particle filter to each of the parameter estimates
loglik.mif <- replicate(n = 10, logLik(pfilter(mf[[1]], params = theta.mif,
Np = 10000)))
bl <- mean(loglik.mif)
loglik.mif.est <- bl + log(mean(exp(loglik.mif - bl)))
loglik.mif.se <- sd(exp(loglik.mif - bl))/exp(loglik.mif.est - bl)
c(est = loglik.mif.est, se = loglik.mif.se)
est se
51.45397 0.09316
"True" uses the original model and coefficients rather than the estimated one, but still approximates the log.likelihood using particle filtering
loglik.true <- replicate(n = 10, logLik(pfilter(gompertz, params = coef(gompertz),
Np = 10000)))
loglik.true.est <- bl + log(mean(exp(loglik.true - bl)))
loglik.true.se <- sd(exp(loglik.true - bl))/exp(loglik.true.est -
bl)
c(est = loglik.true.est, se = loglik.true.se)
est se
50.0128 0.1062
R Package Documentation
Browse R Packages
We want your feedback!
Note that we can't provide technical support on individual packages. You should contact the package authors for that.
Embedding an R snippet on your website
Add the following code to your website.
For more information on customizing the embed code, read Embedding Snippets.